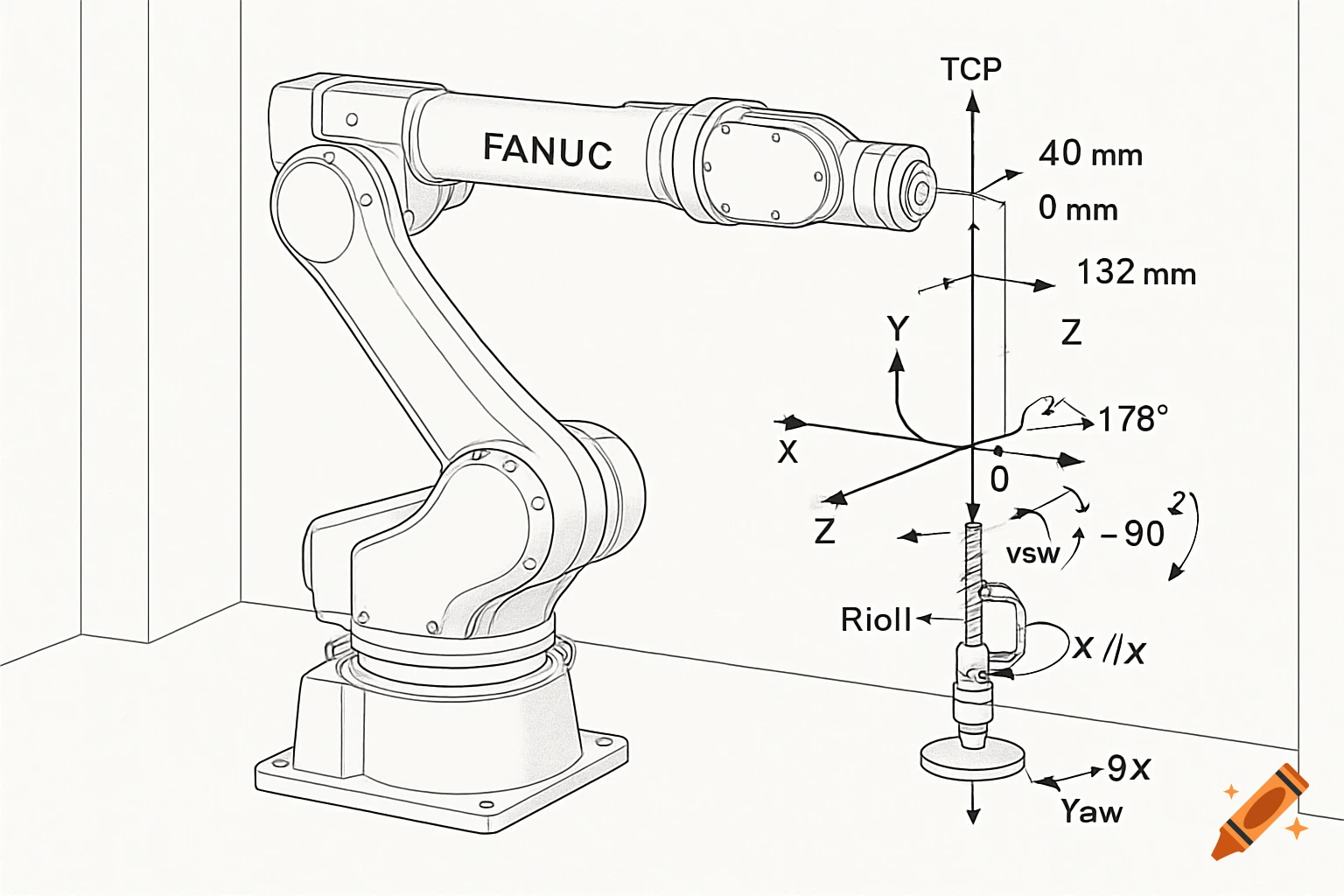
A yellow FANUC robot arm in a factory setting, with coordinate axes X, Y, Z, and dimensions like +40 mm, 0 mm, +132 mm, and rotation values labeled.
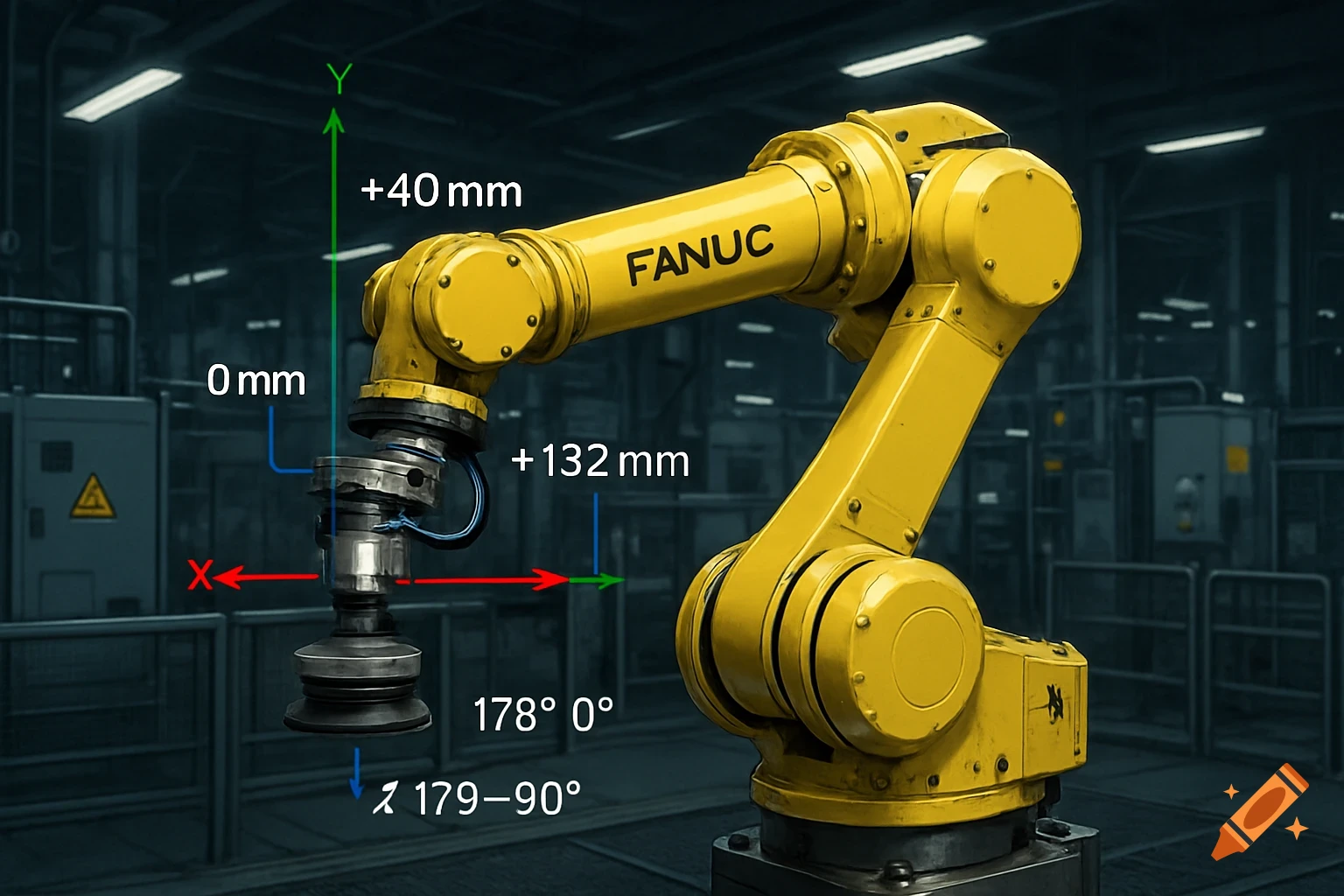
"A 6-axis industrial FANUC robot arm mounted in a factory cell. The robot has a suction cup tool mounted on its flange. The tool center point (TCP) is located 40 mm forward (X), 0 mm sideways (Y), and 132 mm upward (Z) from the flange. The tool is rotated 179 degrees around the X-axis (roll), 0 degrees around the Y-axis (pitch), and -90 degrees around the Z-axis (yaw). Show the robot in a side view with coordinate axes labeled X, Y, Z, and the tool frame orientation clearly illustrated." See more